I am a Research Scientist at Meta Reality Labs. Before that, I was a PostDoc Researcher at Computer Vision and Learning Group (VLG), ETH Zürich. I obtained the Doctoral degree from ETH Zürich in 2024, supervised by Professor Siyu Tang. Prior to this, I obtained my Master degree (2020) in Electrical Engineering and Information Technology, ETH Zürich, and Bachelor degree (2017) in Automation, Tsinghua University.
My research focuses on human motion modelling and human-scene interaction learning.
Email / Google Scholar / Twitter / Github

CVPR, 2025 Highlight
@inproceedings{ICCV25:VolumetricSMPL,
title={{VolumetricSMPL}: A Neural Volumetric Body Model for Efficient Interactions, Contacts, and Collisions},
author={Mihajlovic, Marko and Zhang, Siwei and Li, Gen and Zhao, Kaifeng and M{\"u}ller, Lea and Tang, Siyu},
booktitle={Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV)},
year={2025}
}VolumetricSMPL is a lightweight, plug-and-play extension for SMPL(-X) models that adds volumetric functionality via Signed Distance Fields (SDFs). With minimal integration—just a single line of code—users gain access to fast and differentiable SDF queries, collision detection, and self-intersection resolution.
Siwei Zhang,
CVPR, 2024 Oral Presentation
@inproceedings{zhang2024rohm,
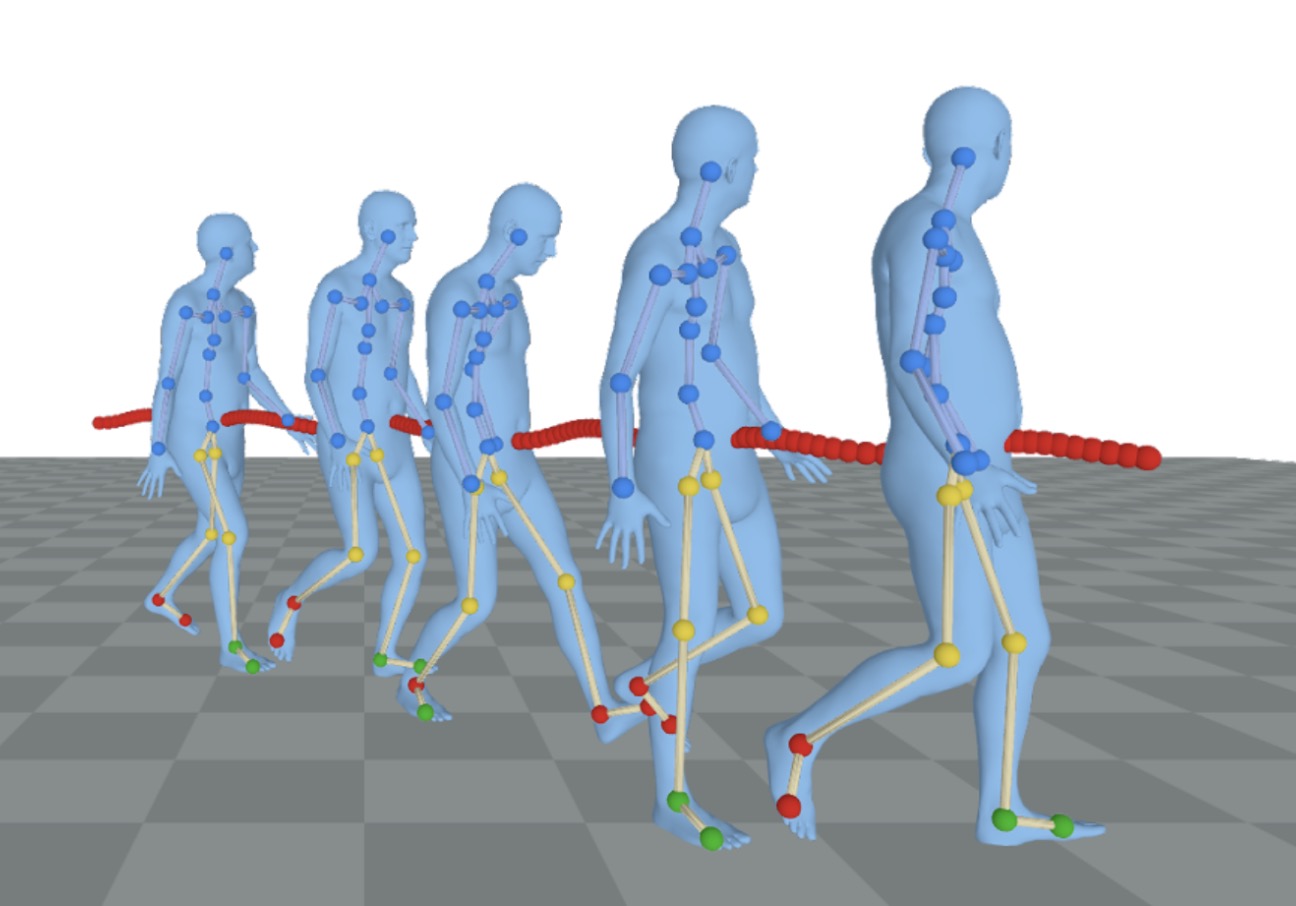
title={RoHM: Robust Human Motion Reconstruction via Diffusion},
author={Zhang, Siwei and Bhatnagar, Bharat Lal and Xu, Yuanlu and Winkler, Alexander and Kadlecek, Petr and Tang, Siyu and Bogo, Federica},
booktitle={CVPR},
year={2024}
}Conditioned on noisy and occluded input data, RoHM reconstructs complete, plausible motions in consistent global coordinates.

CVPR, 2024 Oral Presentation
@inproceedings{li2024egogen,
title={EgoGen: An Egocentric Synthetic Data Generator},
author={Li, Gen and Zhao, Kaifeng and Zhang, Siwei and Lyu, Xiaozhong and Dusmanu, Mihai and Zhang, Yan and Pollefeys, Marc and Tang, Siyu},
booktitle={CVPR},
year={2024}
}EgoGen is new synthetic data generator that can produce accurate and rich ground-truth training data for egocentric perception tasks.

Siwei Zhang,
ICCV, 2023 Oral Presentation
@inproceedings{zhang2023probabilistic,
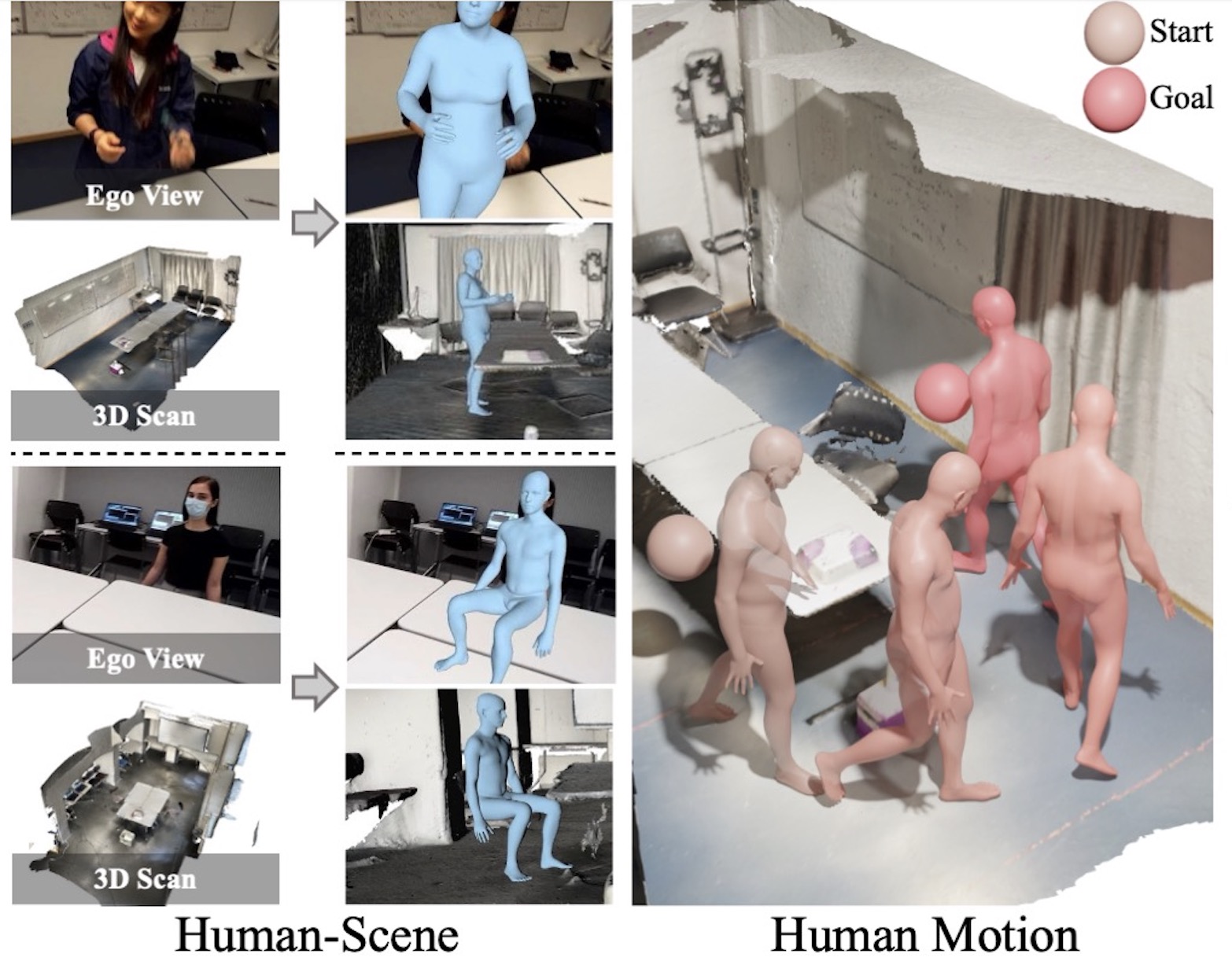
title = {Probabilistic Human Mesh Recovery in 3D Scenes from Egocentric Views},
author = {Siwei Zhang, Qianli Ma, Yan Zhang, Sadegh Aliakbarian, Darren Cosker, Siyu Tang},
booktitle = {Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV)},
pages = {7989--8000},
month = oct,
year = {2023}
}Generative human mesh recovery for images with body occlusion and truncations: scene-conditioned diffusion model + collision-guided sampling = accurate pose estimation on observed body parts and plausible generation of unobserved parts.
MICCAI, 2023 Oral presentation
@inproceedings{wang2023pov,
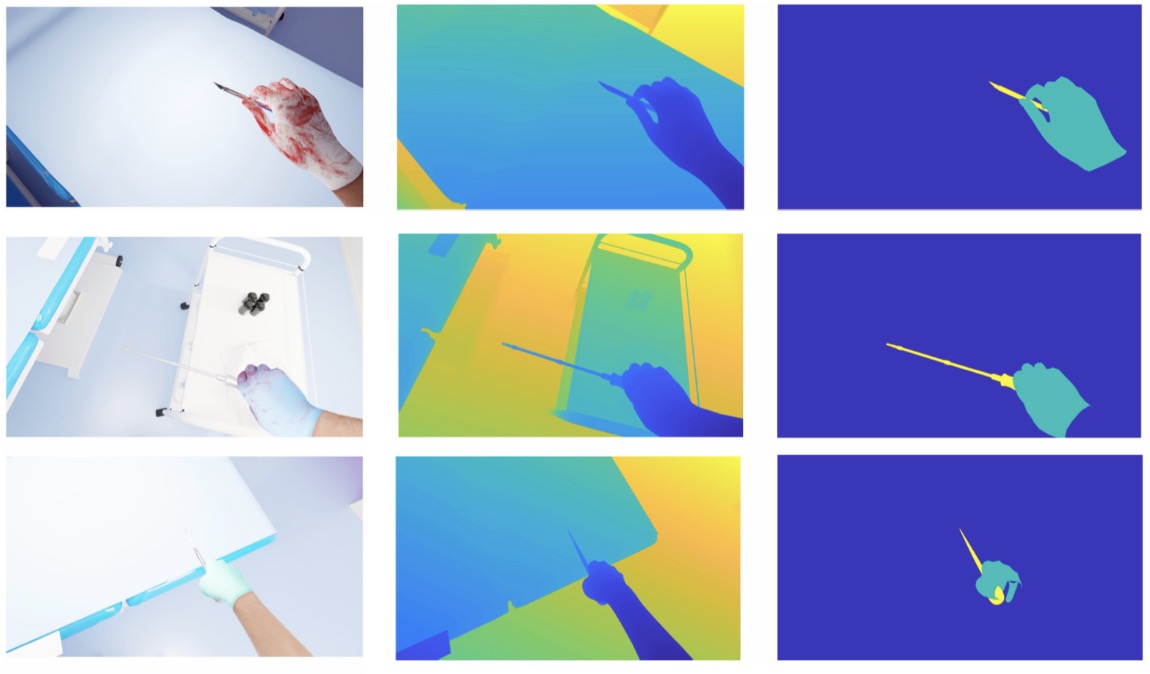
title={POV-Surgery: A Dataset for Egocentric Hand and Tool Pose Estimation During Surgical Activities},
author={Wang, Rui and Ktistakis, Sophokles and Zhang, Siwei and Meboldt, Mirko and Lohmeyer, Quentin},
booktitle={International Conference on Medical Image Computing and Computer-Assisted Intervention},
pages={440--450},
year={2023}
}POV-Surgery is a synthetic egocentric dataset focusing on hand pose estimation with different surgical gloves and orthopedic surgical instruments, featuring RGB-D videos with annotations for activieis, 3D/2D hand-object pose, and 2D hand-object segmentation masks.

Siwei Zhang,
ECCV, 2022
@inproceedings{zhang2022egobody,
title={Egobody: Human body shape and motion of interacting people from head-mounted devices},
author={Zhang, Siwei and Ma, Qianli and Zhang, Yan and Qian, Zhiyin and Kwon, Taein and Pollefeys, Marc and Bogo, Federica and Tang, Siyu},
booktitle={European Conference on Computer Vision},
pages={180--200},
year={2022},
organization={Springer}
}A large-scale dataset of accurate 3D body shape, pose and motion of humans interacting in 3D scenes, with multi-modal streams from third-person and egocentric views, captured by Azure Kinects and a HoloLens2.
(* denotes equal contribution)
ECCV, 2022
@inproceedings{wu2022saga,
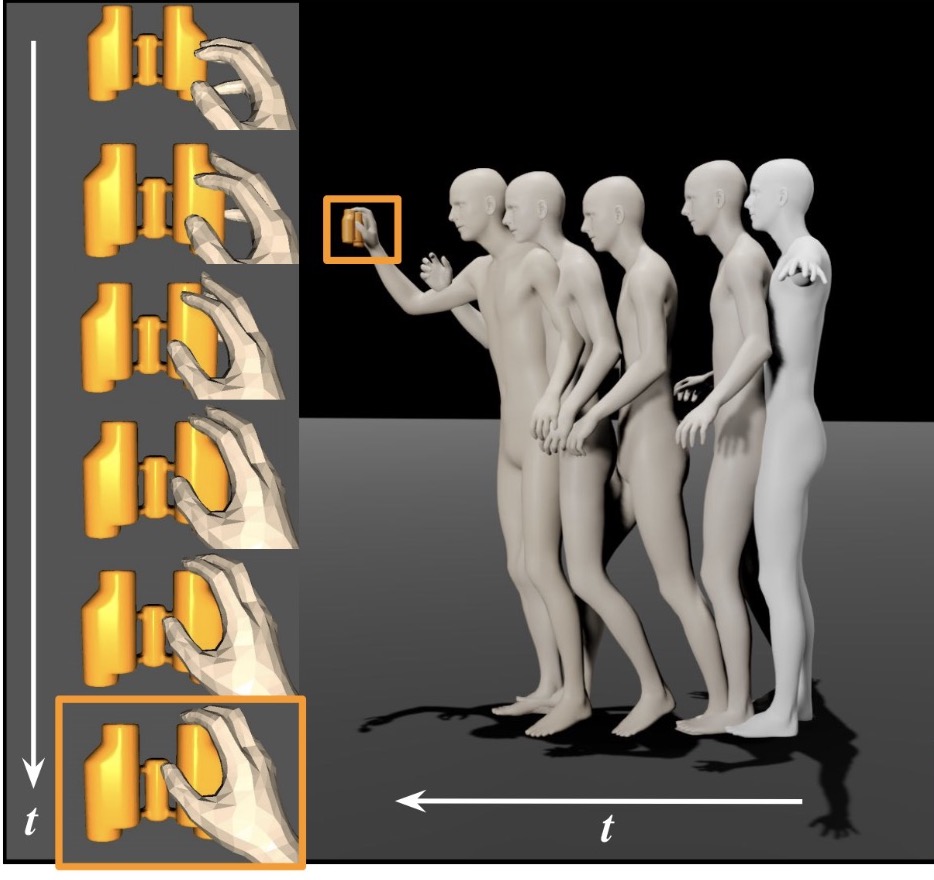
title={Saga: Stochastic whole-body grasping with contact},
author={Wu, Yan and Wang, Jiahao and Zhang, Yan and Zhang, Siwei and Hilliges, Otmar and Yu, Fisher and Tang, Siyu},
booktitle={European Conference on Computer Vision},
pages={257--274},
year={2022},
organization={Springer}
}Starting from an arbitrary initial pose, SAGA generates diverse and natural whole-body human motions to approach and grasp a target object in 3D space.

Siwei Zhang,
ICCV, 2021 Oral Presentation
@inproceedings{zhang2021learning,
title={Learning motion priors for 4d human body capture in 3d scenes},
author={Zhang, Siwei and Zhang, Yan and Bogo, Federica and Pollefeys, Marc and Tang, Siyu},
booktitle={Proceedings of the IEEE/CVF International Conference on Computer Vision},
pages={11343--11353},
year={2021}
}LEMO learns motion priors from a larger scale mocap dataset and proposes a multi-stage optimization pipeline to enable 3D motion reconstruction in complex 3D scenes.

Siwei Zhang,
3DV, 2020
@inproceedings{zhang2020place,
title={PLACE: Proximity learning of articulation and contact in 3D environments},
author={Zhang, Siwei and Zhang, Yan and Ma, Qianli and Black, Michael J and Tang, Siyu},
booktitle={2020 International Conference on 3D Vision (3DV)},
pages={642--651},
year={2020},
organization={IEEE}
}An explicit representation for 3D person-scene contact relations that enables automated synthesis of realistic humans posed naturally in a given scene.
Siwei Zhang,
WACV, 2021
@inproceedings{zhang2021facial,
title = {Facial Emotion Recognition with Noisy Multi-task Annotations},
author = {Zhang, Siwei and Huang, Zhiwu and Paudel, Danda Pani and Gool, Luc Van},
booktitle = {Winter Conference on Applications of Computer Vision (WACV)},
month={jan},
year = {2021}
}To reduce human labelling effort on multi-task labels, we introduce a new problem of facial emotion recognition with noisy multi-task annotations.
(* denotes equal contribution)
AAAI, 2021
@inproceedings{wu2021neural,
title = {Neural architecture search as sparse supernet},
author = {Wu, Yan and Liu, Aoming and Huang, Zhiwu and Zhang, Siwei and Van Gool, Luc},
booktitle = {Proceedings of the AAAI Conference on Artificial Intelligence},
volume={35},
number={12},
pages={10379--10387},
year = {2021}
}We model the NAS problem as a sparse supernet using a new continuous architecture representation with a mixture of sparsity constraints.

BMVC, 2019 Spotlight Presentation
@inproceedings{zhang2019one,
title = {One-shot Face Reenactment},
author = {Zhang, Yunxuan and Zhang, Siwei and He, Yue and Li, Cheng and Loy, Chen Change and Liu, Ziwei},
booktitle = {BMVC},
month = September,
year = {2019}
}We propose a novel one-shot face reenactment learning system, that is able to disentangle and compose appearance and shape information for effective modeling.
- Main organizer of Humans workshop at CVPR 2024.
- Main organizer of Human Body, Hands, and Activities from Egocentric and Multi-view Cameras workshop and EgoBody benchmark at ECCV 2022.
- Serve as reviewer for ICCV, CVPR, ECCV, 3DV, AAAI, and SIGGRAPH.
|
Template adapted from Jon Barron's and Qianli Ma's websites. |